木半順序集合を親写像表現
$(T{{=}} ¥{ t_0,t_1,$
$¥ldots,$
$ t_N¥} , ¥pi:
T ¥setminus ¥{ t_0 ¥} ¥to T)$
で表す.
因果観測量列
$[{}¥{ {¥mathsf O}_t ¥}_{ t ¥in T} ,
¥{ ¥Phi_{¥pi(t), t }{}: $
$L^¥infty({¥Omega}_{t}{})¥to L^¥infty({¥Omega }_{¥pi(t)}{}) ¥}_{ t ¥in T¥setminus ¥{t_0¥} }$
$]$の
実現因果観測量を
$¥widehat{¥mathsf O}_{T{}}$
${{=}} (
{{{¥times}}}_{t ¥in T} X_t, $
${¥boxtimes_{t ¥in T} {¥cal F}_t}, $
$
{¥widehat F}_{t_0})$
として,
測定
¥begin{align*}
{¥mathsf M}_{L^¥infty (¥Omega_{t_0})} (¥widehat{¥mathsf O}_{T{}} {{=}} (
{{{¥times}}}_{t ¥in T} X_t, {¥boxtimes_{t ¥in T} {¥cal F}_t},
{¥widehat F}_{t_0}), S_{[¥ast]}{})
¥qquad
¥end{align*}
を考える.
この測定
${¥mathsf M}_{L^¥infty(¥Omega_{t_0}{})}(¥widehat{¥mathsf O}_{T{}}, S_{[*]})$
により得られた測定値が
${¥widehat ¥Xi}
¥;(¥in
{¥boxtimes_{t ¥in T} {¥cal F}_t}
)$
に属したとする.
このとき,
フィッシャーの最尤法(定理5.6)により,
次が推定できる:
¥begin{align*}
[{}¥ast{}]
=
{¥omega_{t_0}}
¥end{align*}
ここで,${¥omega_{t_0}} ¥;(¥in ¥Omega_{t_0})$
は
¥begin{align*}
[¥widehat F_{t_0} (
{¥widehat ¥Xi}
)](¥omega_{t_0}) =
¥max_{¥omega ¥in ¥Omega_{t_0}} [¥widehat F_{t_0} (
{¥widehat ¥Xi}
){}](¥omega)
¥end{align*}
によって定まる.
したがって、
一言で言えば、
¥begin{align}
¥textcolor{magenta}{¥fbox{回帰分析}}
=
&
¥textcolor{blue}{ ¥underset{(推定法)}{¥fbox{フィッシャーの最尤法}} + ¥fbox{実現因果観測量}
}
¥end{align}
である。
問題13.1
を測定理論の言葉
(すなわち,回帰分析(定理13.4))で答えよう.
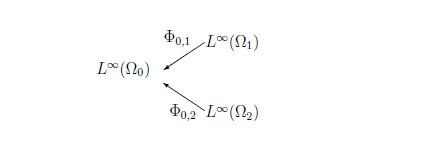
木半順序集合を親写像表現
$(T{{=}} ¥{ 0,1,2¥} , ¥pi:
T ¥setminus ¥{ 0 ¥} ¥to T)$
で表して,
$¥pi(1)=¥pi(2)=0$
とする.
状態空間を
$¥Omega_0
=¥{¥omega_1, ¥omega_2,¥ldots,¥omega_5¥}$,
$¥Omega_1 = 区間
[100,200]$,
$¥Omega_2 = 区間[30,110]$とおく.
もちろん,同一視:
¥begin{align*}
¥omega_n
・・・
¥text{
「少年を助けたのが学生$¥omega_n$である」
}
という状態
¥quad
(n=1,2,...,5)
¥end{align*}
を考える.
各
$t ¥;(¥in ¥{ 1,2 ¥})$に対して,
決定的因果写像
$¥phi_{0,t}{}: ¥Omega_0 ¥to ¥Omega_t $
を
$¥phi_{0,1}=h$(身長関数),
$¥phi_{0,2}=w$(体重関数)
と定める.
よって,
各
$t ¥;(¥in ¥{ 1,2¥})$に対して,
決定的因果作用素
$¥Phi_{0,t}{}: L^¥infty(¥Omega_t) ¥to L^¥infty(¥Omega_0{}) $
は
次のように
定まる:
¥begin{align*}
[¥Phi_{0,t} f_t] (¥omega)
= f_t (¥phi_{0,t} (¥omega){})
¥qquad
(¥forall ¥omega ¥in ¥Omega_0, ¥forall f_t ¥in L^¥infty(¥Omega_t))
¥end{align*}
$t=1,2$
として,標準偏差$¥sigma_t >0$を持つ
$C (¥Omega_t)$内の{¥it 正規観測量}
${¥mathsf O}_{G_{¥sigma_t}} =
({¥mathbb R}, {¥cal B}_{¥mathbb R}, G_{¥sigma_t})$,
すなわち,
¥begin{align*}
[G_{¥sigma_t}(¥Xi)] (¥omega) = ¥frac{1}{¥sqrt{2 ¥pi ¥sigma_t^2}}
¥int_{¥Xi} e^{- ¥frac{(x - ¥omega)^2}{2 ¥sigma_t^2}} dx
¥quad (¥forall ¥Xi ¥in {¥cal B}_{¥mathbb R}, ¥forall ¥omega ¥in
¥Omega_t
)
¥end{align*}
十分に大きな自然数$N$に対して,区間
$¥Xi_1, ¥Xi_2 ¥subset {¥mathbb R}$
を,
${¥mathsf M}_{L^¥infty (¥Omega_0)} (¥widehat{¥mathsf O}_{T{}},
S_{[¥ast]}{})$により得られた測定値
は
(165,65) $ (¥in {¥mathbb R}^2)$
であるから,
測定値は
$¥Xi_1 ¥times ¥Xi_2$
に属す.
ここで,
定理13.4[回帰分析]
(または,
フィッシャーの最尤法(定理5.6))
より,
問題
は,
よって,少年を助けたのは,
学生$¥omega_4$と推定される.
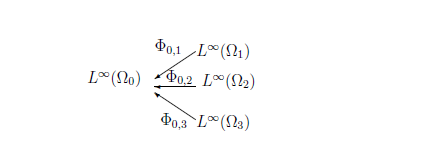
問題13.2
では,離散時間
$T=¥{0,1,2,3¥}$
が
直列構造を持つと考えるのが自然で,
親写像$¥pi :T¥setminus¥{0¥} ¥to T$
を$¥pi ( t ) = t-1$
$¥;(t=1,2,3)$と定める.
4つの状態空間を,
たとえば,
$¥Omega_0
= [0,¥; 1]
¥times [0,¥; 2]
$,
$¥Omega_1 =[0,¥; 4] ¥times [0,¥; 2]$,
$¥Omega_2 = [0,,¥; 6] ¥times [0,¥; 2]$,
$¥Omega_3 = [0, ¥; 8] ¥times [0,¥; 2]$
更に,
$¥sigma>0$を標準偏差として,
各
$t=1,2,3$に対して,
$L^¥infty (¥Omega_t)$内の
正規観測量
${¥mathsf O}_{t} {{=}} ({¥mathbb R}, {¥cal B}_{¥mathbb R}, G_{¥sigma})$
を次のように定義する:
¥begin{align*}
[G_{¥sigma}(¥Xi)] (¥omega) = ¥frac{1}{¥sqrt{2 ¥pi ¥sigma^2}}
¥int_{¥Xi} e^{- ¥frac{(x - ¥omega)^2}{2 ¥sigma^2}} dx
¥quad (¥forall ¥Xi ¥in {¥cal B}_{¥mathbb R}, ¥forall ¥omega ¥in ¥Omega_t
{{=}}
[{}0, ¥; 2t+2{}])
¥end{align*}
よって,
決定的因果観測量列
$[ ¥{{¥mathsf O}_{t}¥}_{t=1,2,3}
,
¥{¥Phi_{¥pi(t),t}{}: L^¥infty(¥Omega_{t}) ¥to L^¥infty(¥Omega_{¥pi(t)}
)
¥}_{t ¥in ¥{1,2,3¥}}
]$
を得る.
このとき,
${L^¥infty(¥Omega_0{})}$内の
実現因果観測量
$¥widehat{¥mathsf O}_{T{}}$
${{=}}$
$({¥mathbb R}^3, {¥cal F}_{{¥mathbb R}^3}, {¥widehat F}_0)$
は,定理14.5より,
次のように定まる:
¥begin{align*}
&
[{¥widehat F}_0(¥Xi_1 ¥times ¥Xi_2 ¥times ¥Xi_3{})]
(¥omega_0)
=
¥big[
¥Phi_{0,1}
¥big(G_{¥sigma} ({¥Xi_1})
¥Phi_{1,2} (G_{¥sigma} ({¥Xi_2})
¥Phi_{2,3} (G_{¥sigma} ({¥Xi_3})
))
¥big)
¥big]
(¥omega_0)
¥¥
=
&
[¥Phi_{0,1} G_{¥sigma} ({¥Xi_1})] (¥omega_0)
¥cdot
[¥Phi_{0,2} G_{¥sigma}({¥Xi_2})] (¥omega_0)
¥cdot
[¥Phi_{0,3} G_{¥sigma}({¥Xi_3})] (¥omega_0)
¥¥
=
&
[G_{¥sigma} ({¥Xi_1})] (¥phi_{0,1}(¥omega_0){})
¥cdot
[G_{¥sigma} ({¥Xi_2})] (¥phi_{0,2}(¥omega_0){})
¥cdot
[G_{¥sigma}({¥Xi_3})] (¥phi_{0,3}(¥omega_0){})
¥¥
&
¥qquad ¥qquad
(¥forall ¥Xi_1, ¥Xi_2, ¥Xi_3 ¥in {¥cal B}_{¥mathbb R},
¥;
¥forall ¥omega_0 =(¥alpha, ¥beta{}) ¥in ¥Omega_0
= [0, ¥; 1] ¥times [0, ¥; 2]{})
¥end{align*}
さて,
問題13.2
(制御問題)は,
${¥mathsf M}_{L^¥infty (¥Omega_0)} ($
$¥widehat{¥mathsf O}_{T{}}, $
$S_{[¥ast]}{})$
によって,
測定値:
¥begin{align*}
(1.9, ¥; 3.0, ¥; 4.7) ¥; (¥in {¥mathbb R}^3)
¥end{align*}
よって,
目標測定値
$(1.9, ¥; 3.0, ¥; 4.7)$
を得るための,
$(¥alpha, ¥beta)$
の制御状態$(0.4, ¥; 1.4)$
を得る.
以上であるが,
7.1.2節の
(d)で述べた
「制御問題$(c_1)$
と
推定問題$(c_2)$の
実質的同値性」
を再度確認してもらいたい.
念のために、確認すると、
である。
したがって、
統計学(推定が主)
と
動的システム理論(制御が主)
は本質的には同じと考える。
前章の結果
(すなわち,
言語ルール2(因果関係)
とフィッシャーの最尤法(定理5.6)
から
直ちに次を得る:
解答 13.5[問題13.1(推定問題)から続く)回帰分析]
を考えて,
決定的因果観測量列
$[ ¥{{¥mathsf O}_{G_{¥sigma_t}}¥}_{t=1,2}
,
¥{
¥Phi_{0, t}
:
L^¥infty(¥Omega_t) ¥to L^¥infty(¥Omega_0)¥}_{t=1,2}
]$
を得る.
このとき,
${L^¥infty(¥Omega_0{})}$
内の
実現因果
観測量
$¥widehat{¥mathsf O}_{T{}}$
${{=}}$
$({¥mathbb R}^2, {¥cal F}_{{¥mathbb R}^2}, {¥widehat F}_0)$
を
次のように得る:
¥begin{align*}
[{¥widehat F}_0(¥Xi_1 ¥times ¥Xi_2 {})]
(¥omega)
&=
[¥Phi_{0,1} G_{¥sigma_1} ] (¥omega)
¥cdot
[¥Phi_{0,2} G_{¥sigma_2}] (¥omega)
¥¥
&=
[G_{¥sigma_1} ({¥Xi_1})] (¥phi_{0,1}(¥omega){})
¥cdot
[G_{¥sigma_2} ({¥Xi_2})] (¥phi_{0,2}(¥omega){})
¥¥
&
¥qquad ¥qquad
(¥forall ¥Xi_1, ¥Xi_2 ¥in
{¥cal B}_{¥mathbb R}
,
¥;
¥forall ¥omega ¥in ¥Omega_0
=
¥{¥omega_1, ¥omega_2,¥ldots,¥omega_5¥}
)
¥end{align*}
という問題に帰着される.
$N$は十分に大きいから,
¥begin{align*}
({{¥sharp}} )
¥Longrightarrow
&
¥max_{ ¥omega ¥in ¥Omega_0 }
¥frac1{{¥sqrt{(2 ¥pi)^2 ¥sigma_1^2 ¥sigma_2^2}{}}}
¥mathop{
¥int}_{
¥Xi_1 ¥times ¥Xi_2 }
¥exp
{
[
{}- ¥frac{
({}{x_1} - h(¥omega){})^2
}{2 ¥sigma_1^2}
- ¥frac{
({}{x_2} - {}w(¥omega){})^2
}{2 ¥sigma_2^2}
{}]
}
d {}{x_1} d {}{x_2}
¥¥
¥Longrightarrow
&
¥max_{ ¥omega ¥in ¥Omega_0 }
¥exp
{
[
{}- ¥frac{
({}{165} - h(¥omega){})^2
}{2 ¥sigma_1^2}
- ¥frac{
({}{65} - {}w(¥omega){})^2
}{2 ¥sigma_2^2}
{}]
}
¥¥
¥Longrightarrow
&
¥min_{ ¥omega ¥in ¥Omega_0 }
{
[
¥frac{
({}{165} - h(¥omega){})^2
}{2 ¥sigma_1^2}
+ ¥frac{
({}{65} - {}w(¥omega){})^2
}{2 ¥sigma_2^2}
{}]
}
¥¥
&
¥text{(
簡単のため,
$¥sigma_1=¥sigma_2$と仮定して)}
¥¥
¥Longrightarrow
&
¥text{$¥omega_4$のとき,最小値}¥frac{
({}{165} - 170{})^2+({}{65} - 60{})^2
}{2 ¥sigma_1^2}
¥text{を得る.}
¥end{align*}
$(¥sharp):$
$
[{¥widehat F}_0(¥{¥Xi_1 ¥times ¥Xi_2)]
(¥omega
)$
を最大とするような
$¥omega_0$
$(¥in ¥Omega_0)$
を見つけよ.
さて,次に
問題13.2
を測定理論の言葉
(すなわち,回帰分析(定理13.4))で解答しよう.
解答 13.6[(問題13.2(制御問題)から続く)回帰分析]
を得ることを期待しているのであった.
十分に大きな$N$に対して,
¥begin{align*}
¥Xi_1 =¥left[{}1.9 - ¥frac1{N}, 1.9 + ¥frac1{N}¥right],
¥Xi_2 =¥left[{}3.0 - ¥frac1{N}, 3.0 + ¥frac1{N}¥right],
¥Xi_3 =¥left[{}4.7 - ¥frac1{N}, 4.7 + ¥frac1{N}¥right]
¥end{align*}
とおいて,
フィッシャーの最尤法(定理5.6)
より,
問題13.2
は
という問題に帰着される.
$N$は十分大きな自然数と仮定しているので,
¥begin{align*}
({{¥sharp}} )
¥Longrightarrow
&
¥max_{ (¥alpha, ¥beta{}) ¥in ¥Omega_0 }
[{¥widehat F}_0(¥Xi_1 ¥times
¥Xi_2
¥times
¥Xi_3
)]
(¥alpha, ¥beta{})
¥¥
¥Longrightarrow
&
¥max_{ (¥alpha, ¥beta{}) ¥in ¥Omega_0 }
¥frac1{{¥sqrt{2 ¥pi ¥sigma^2}{}}^3}
¥mathop{
¥int¥int¥int}_{
¥Xi_1 ¥times ¥Xi_2 ¥times ¥Xi_3 }
e^{
[{}- ¥frac{
({}{x_1} - (¥alpha + ¥beta{}){})^2 +
({}{x_2} - (¥alpha + 2 ¥beta{}){})^2 +
({}{x_3} - (¥alpha + 3 ¥beta{}){})^2
}{2 ¥sigma^2}{}]
}
¥¥
&
¥times
d {}{x_1} d {}{x_2} d {}{x_3}
¥¥
¥Longrightarrow
&
¥max_{ (¥alpha, ¥beta{}) ¥in ¥Omega_0 }
¥exp(-J/(2 ¥sigma^2))
¥¥
¥Longrightarrow
&
¥min_{ (¥alpha, ¥beta{}) ¥in ¥Omega_0 } J
¥end{align*}
ここに
¥begin{align}
J = (1.9 -(¥alpha + ¥beta{}){})^2 +
(3.0 - (¥alpha + 2 ¥beta{}){})^2 +
(4.7 - (¥alpha + 3 ¥beta{}){})^2
¥end{align}
(
$
¥frac{¥partial J}{¥partial ¥alpha}=0,
¥frac{¥partial J}{¥partial ¥beta}=0
¥text{として}
$
)
¥begin{align*}
¥Longrightarrow
&
¥begin{cases}
(1.9 -(¥alpha + ¥beta{}){}) +
(3.0 - (¥alpha + 2 ¥beta{}){}) +
(4.7 - (¥alpha + 3 ¥beta{}){}) = 0
¥¥
(1.9 -(¥alpha + ¥beta{}){}) +
2 (3.0 - (¥alpha + 2 ¥beta{}){}) +
3 (4.7 - (¥alpha + 3 ¥beta{}){}) = 0
¥end{cases}
¥¥
¥Longrightarrow
&
¥quad
(¥alpha, ¥beta{}) =
(0.4, 1.4)
¥end{align*}
$(¥sharp):$
$
[{¥widehat F}_0(¥Xi_1 ¥times
¥Xi_2
¥times
¥Xi_3
)]
(¥alpha, ¥beta{})$
を最大とするような
$(¥alpha, ¥beta{})$
$(=¥omega_0 ¥in ¥Omega_0)$
を見つけよ.
注意13.7
$¥bullet$
理論的観点からは、
13.2:回帰分析=因果関係+フィッシャーの最尤法
This web-site is the html version of "Linguistic Copehagen interpretation of quantum mechanics; Quantum language [Ver. 4]" (by Shiro Ishikawa; [home page] )
PDF download : KSTS/RR-18/002 (Research Report in Dept. Math, Keio Univ. 2018, 464 pages)
定理 13.4 [回帰分析]
$¥square ¥quad$
