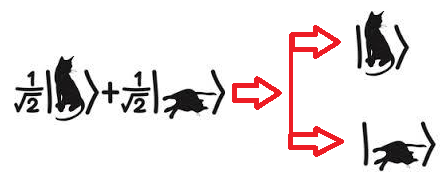
11.2: 波束の収縮 ( i.e., 射影公準 )
量子基本構造
$[{\mathcal C}(H),B(H)]_{B(H)}$
を考える。
加算集合$\Lambda$を考える。$B(H)$内の射影観測量${\mathsf O}_P =( \Lambda ,2^{\lambda}, P)$を固定する。
二つの量子基本構造
$[{\mathcal C}(H),B(H)]_{B(H)}$
と
$[{\mathcal C}(H \otimes K),B(H \otimes K)]_{B(H \otimes K)}$
を考えよう。
$\{ P_\lambda \; |\; \lambda \in \Lambda \}$は式(11.9)の通りとする。
$\{ e_{\lambda} \}_{\lambda \in \Lambda }$をヒルベルト空間$K$内の完全正規直交系
(CONS)とする。
前共役マルコフ作用素
$\Psi_*: Tr(H) \to Tr(H \otimes K)$
を次のように定義する:
したがって、マルコフ作用素$\Psi: B(H \otimes K) \to B(H)$
( in Axiom 2)
を
$\Psi = (\Psi_*)^*$
で定義できる。
$B(K)$内の
射影観測量${\mathsf O}_G = ( {\Lambda}, 2^{\Lambda}, G)$を次のように定める:
ここで、${\mathsf O}_F = (X, {\mathcal F}, F)$
を$B(H)$内の任意の観測量として、$B(H \otimes K)$内のテンソル観測量
${\mathsf O}_F \otimes {\mathsf O}_G$
$=$
$(X \times {\Lambda } ,{\mathcal F} \boxtimes 2^{\Lambda }, F \otimes G )$
を得る(
${\mathcal F} \boxtimes 2^{\Lambda }$
は積$\sigma$-集合体).
純粋状態$\rho = |u \rangle \langle u |$
$( u \in H , \| u \|_H = 1 )$
を固定して、
測定
${\mathsf M}_{B(H)} (\Psi( {\mathsf O}_F \otimes {\mathsf O}_G), S_{[\rho ]} )$
を考えよう。
このとき、言語ルール1 (測定; $\S$2.7)により、次を得る:
ここで、観測量${\mathsf O}_F$は任意であったことに注意しよう。
また、上(i.e., the 射影公準 (D))は言語ルール1と2の帰結であることにも注意しよう。
の下に、
と結論することには一理ある。
ここで、禁句「測定後の状態」が(D$_2$)では使われていないことを確認せよ。
したがって、
言語的解釈では、「測定後の状態」は意味がないわけで、
波束の収縮も意味がない。
しかしながら、多少の工夫をした測定を行うことで、
「波束の収縮もどき」を実現できる。以下にこのことを説明する(次の論文の抜粋)。
$\bullet$ S. Ishikawa, “Linguistic interpretation of quantum mechanics; Projection Postulate” Journal of Quantum Information Science, Vol. 5 No. 4, 2015, pp. 150-155. DOI: 10.4236/jqis.2015.54017 ( download free)
$\bullet$
S. Ishikawa: "The realization of the wave function collapse in the linguistic interpretation of quantum mechanics,"
arXiv:1511.07777 [physics.gen-ph]
,( 2015), (download free)
or
Reseach Report; Keio Math [KSTS/RR-15/009](S. Ishikawa ).( download free) ,
11.2.1: 問題設定: von Neumann-Lüders の射影公準
となる。
(A1):
測定${\mathsf{M}}_{B(H)} ({\mathsf{O}}_P$ ${\; :=} ( \Lambda ,2^{\lambda}, P),$
$ S_{[\rho]})$によって、測定値 $\lambda_0$
$( \in {\Lambda})$が得られる確率は、 次で与えられる:
\begin{align}
\mbox{Tr}_{{}_H}( \rho P_{\lambda_0} )
(= \langle u , P_{\lambda_0} u \rangle =
\| P_{\lambda_0} u \|^2
),
\quad (\mbox{ where } \rho= |u \rangle \langle u | )
\tag{11.9}
\end{align}
さらに、
von Neumann-Lüders の射影公準
( in the Copenhagen interpretation)は次を主張する:
(A$_2$)
測定${\mathsf{M}}_{B(H)} ({\mathsf{O}}_P$ ${\; :=} ( \Lambda ,2^{\lambda}, P),$
$ S_{[\rho]})$によって、測定値 $\lambda_0$
$( \in {\Lambda})$が得られたとき、
測定後の状態は、$\rho_{\mbox{ post}}$は次で与えられる。
\begin{align}
\rho_{\mbox{ post}}
=\frac{P_{\lambda_0} |u \rangle \langle u |P_{\lambda_0} }{\| P_{\lambda_0} u \|^2}
\tag{11.10}
\end{align}
したがって、さらに測定
${\mathsf{M}}_{B(H)} ({\mathsf{O}}_F{\; :=}(X,{\mathcal F}, F),$
$ S_{[\rho_{\mbox{ post}}]})$を行えば
(ここに ${\mathsf{O}}_F$ は$B(H)$内の任意の観測量), 測定値が
$\Xi ( \in {\mathcal F} )$に属する確率は、次で与えられる:
\begin{align}
\mbox{Tr}_{{}_H} ( \rho_{\mbox{post}} F(\Xi ))
\Big(=
\langle \frac{P_{\lambda_0} u}{\| P_{\lambda_0} u \| }, F(\Xi)
\frac{P_{\lambda_0} u}{\| P_{\lambda_0} u \|} \rangle
\Big)
\tag{11.11}
\end{align}
ここで、次の問題設定を得る:
問題 11.5
言語的解釈においては、測定後の状態( すなわち、von Neumann-Lüders の射影公準 (A$_2$))は無意味である。
また、上 (=(A$_1$)+(A$_2$)) は、同時測定${\mathsf M}_{B(H)}({\mathsf{O}}_F \times {\mathsf{O}}_P, S_{[\rho]})$
(これは、${\mathsf{O}}_P$ and ${\mathsf{O}}_F$が可換でない場合は存在しない).
したがって、von Neumann-Lüders の射影公準 (A$_2$)は一般には成り立たない。
そこで、次の問題設定を得る。
である。
(B)
観測量${\mathsf{O}}_F \times {\mathsf{O}}_P$
(in ${\mathsf M}_{B(H)}({\mathsf{O}}_F \times {\mathsf{O}}_P, S_{[\rho]})$)
がダメならば、 如何なる観測量を設定すればよいか?
11.2.2: 言語的解釈の枠組み内でのvon Neumann-Lüders 射影公準の導出
\begin{align*}
&
\mbox{Tr}_{{}_H}[ (|u \rangle \langle u |) \Psi( F(\Xi) \otimes G(\{\lambda_0 \}))]
=
{}_{{}_{\scriptsize {Tr}(H)}} \big(|u \rangle \langle u |,
\Psi( F(\Xi)
\otimes G(\{\lambda_0 \}) )
\big)_{{}{B(H)}}
\\
=
&
{}_{{}_{\scriptsize {Tr}(H \otimes K)}} \big(\Psi_* (|u \rangle \langle u |),
F(\Xi)
\otimes G(\{ \lambda_0 \})
\big)_{{}{B(H \otimes K)}}
=
\mbox{Tr}_{{}_{H \otimes K }}
[
(\Psi_* (|u \rangle \langle u |))
( F(\Xi) \otimes G(\{\lambda_0 \}) ) ]
\\
=
&
\mbox{Tr}_{{}_{H \otimes K }}
[(
|\sum_{\lambda \in \Lambda }( P_{\lambda} u \otimes e_{\lambda})\rangle \langle \sum_{\lambda \in \Lambda }( P_{\lambda} u \otimes e_{\lambda}) |
)
(
F(\Xi) \otimes |e_{\lambda_0} \rangle \langle e_{\lambda_0} | ) ]
\\
=
&
\langle P_{\lambda_0} u , F(\Xi ) P_{\lambda_0} u \rangle
\quad
(\forall \Xi \in {\mathcal F} )
\end{align*}
( (11.13)の場合も同じように計算できる).
(C)
${\mathsf M}_{B(H)} (\Psi ( {\mathsf O}_F \otimes {\mathsf O}_G),$
$ S_{[\rho ]} )$によって得られる測定値$(x, \lambda )$
が
$ \Xi \times\{ \lambda_0 \}$
に属する確率は次のようになる:
したがって、次を結論できる。
(D$_1$)
もし$\Xi=X$ならば、次が成立:
\begin{align}
\mbox{Tr}_{{}_H}
[ (|u \rangle \langle u |) \Psi( F(X) \otimes G(\{\lambda_0 \}) )]
=
\langle P_{\lambda_0} u, P_{\lambda_0} u \rangle
= \| P_{\lambda_0} u \|^2
\tag{11.14}
\end{align}
(D$_2$)
測定値$( x , \lambda )$が$ X \times \{ \lambda_0 \}$に属したとき、
$x \in \Xi$である条件付き確率は、次で与えられる:
\begin{align}
\frac{\langle P_{\lambda_0} u , F(\Xi ) P_{\lambda_0} u \rangle}{
\| P_{\lambda_0} u \|^2
}
\Big(
=
\langle \frac{P_{\lambda_0} u}{\| P_{\lambda_0} u \| }, F(\Xi)
\frac{P_{\lambda_0} u}{\| P_{\lambda_0} u \|} \rangle
\Big)
\quad (\forall \Xi \in {\mathcal F } )
\tag{11.15}
\end{align}
対応$\mbox{(A)} \Leftrightarrow \mbox{(D)}$、
すなわち、
$$
{\mathsf{M}}_{B(H)} ({\mathsf{O}}_P,
S_{[\rho]})
\mbox{
$\Big($or, 無意味な$
{\mathsf{M}}_{B(H)} ({\mathsf{O}}_F \times {\mathsf O}_P,
S_{[\rho]})
$
$\Big)$
}
\Leftrightarrow
{\mathsf M}_{B(H)}(\Psi ({\mathsf O}_F \otimes {\mathsf O}_G ), S_{[\rho ]} ),
$$
つまり,
$$
\quad
\mbox{(11.9)} \Leftrightarrow \mbox{(11.14)},
\quad
\mbox{(11.11)} \Leftrightarrow \mbox{(11.15)}
$$
である。
公準 11.6 [射影公準] (D$_2$)の省略形として、(A$_2$)をしばしば使う: すなわち、
| (E) | ${\mathsf{M}}_{B(H)} ({\mathsf{O}}_P{\; :=} ( \Lambda ,2^{\lambda}, P),$ $ S_{[\rho]})$に よって測定値$\lambda_0$ $( \in {\Lambda})$が得られたとき、 測定後の状態$\rho_{\mbox{ post}}$は次で与えられる: \begin{align} \rho_{\mbox{ post}} =\frac{P_{\lambda_0} |u \rangle \langle u |P_{\lambda_0} }{\| P_{\lambda_0} u \|^2} \tag{11.16} \end{align} |
 Remark 11.7
Remark 11.7
いわゆるコペンハーゲン解釈は、「測定後の状態(i.e., 波束の収縮)」を認めている。 そうならば、読者は、(D$_2$)の帰結として、観測量${\mathsf O}_F$の任意性より
- 測定後の状態=$\frac{P_{\lambda_0} |u \rangle \langle u |P_{\lambda_0} }{\| P_{\lambda_0} u \|^2}$
と結論するかもしれない。 しかし、言語的解釈「測定は一回だけ」では、この結論は間違いである。 もし「測定後の状態」を認めてしまったら、 困った問題が続出する。 たとえば、「測定はいつ成されたのか?」、「波束の収縮はいつ起きるのか?、 その速さは?」等であり、 これらは当然のことであるが、言語ルール1と2の範囲外である。
量子言語は言語なのだから、ウィトゲンシュタインの言葉「 "The limits of my language mean the limits of my world", 」 or 「 "What we cannot speak about we must pass over in silence." 」を思い出すべきである。
サプリ
(D$_2$)の省略形としての射影公準は単純であった。 しかし、文字通りに、von Neumann-Lüders の射影公準(A$_2$)を信じてしまうと、袋小路に嵌ってしまう。 たとえば、
| $\bullet$ | 測定した瞬間とは、信号が 「抽象的自我」 に到達した瞬間のことである。( by von Neumann) |
| $\bullet$ | 波束の収縮を起こす能力は、人類特有の能力である。 |
| $\bullet$ | 別の測定値を得たら、別の波動関数を得るわけで、これは別の世界に入り込んだことを意味する(多世界解釈)。 |
- そもそも、「(波束の収縮を認める)コペンハーゲン解釈」がトンデモ理論だった
わけである。
